【Siggraph 2012】Local Image-based Lighting With Parallax-corrected Cubemap
今天介绍的是基于cubemap的环境反射效果的优化方案,基于此方案,可以有效缓解cubemap捕获位置跟相机位置不重叠导致的反射效果异常问题。
增强游戏画面品质常用的手段是提供更为真实的间接光效果,而其中有一项常用的手段是基于IBL的环境光反射方案。
这里照例对工作内容做一个总结:
- cubemap常常用于实现反射效果,这里包含了远景天光反射(Camera-based)与近景局部反射(Object-based)两种策略
- 局部反射存在多个cubemap覆盖范围过渡问题与视差distortion问题
- 过渡问题可以通过基于POI(相机或者角色位置)对现有的多个cubemap做融合的方式来解决
- 视差问题有几种解决策略
- 第一种方法是用一个box volume将cubemap采样范围覆盖起来,通过视线反射方向与volume的交点来得到反射颜色,这种方法计算消耗较高
- 第二种方法是对第一种方法的简化,跳过了反射点的位置数据的处理,通过一个简化的公式来计算结果,其中需要美术同学对系数k做精细调校,比较费时间,效率低
- 第三种方法则直接基于一个反射平面求取被反射点的颜色,通过对cubemap上texel遍历调用相关逻辑完成cubemap对shading scene的作用,这里还介绍到了反射平面带有法线的情况的问题处理方式
- 第四种方法是对cubemap texel遍历方式的优化,将cubemap先映射到一个符合当前场景形状的几何体上,通过对几何体做光栅化的方式完成cubemap的叠加作用,这种方式在部分非box形状的场景中,效果会更好
本文的关注点是静态光滑物件表面的高光反射效果,因为是静态,所以数据可以走离线生成。
IBL方案主要有两个应用场景:
- 近景光照模拟
- 远景光照模拟
先来看看远景部分。
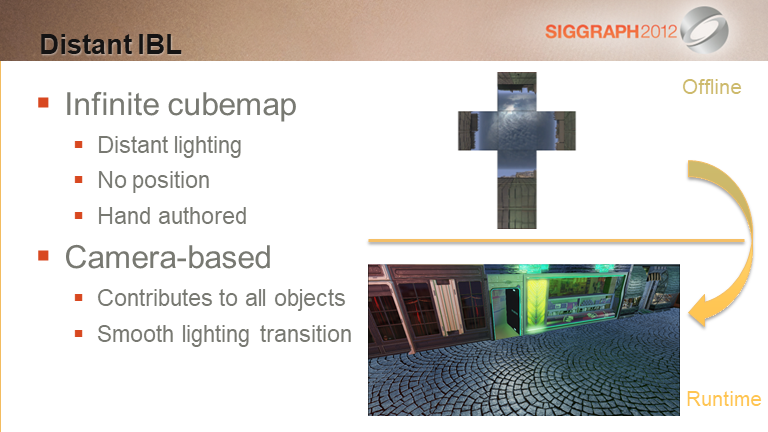
远景的光照通常是通过一张存储了较远的场景元素(如天空山脉等)的cubemap贴图来表示,这张贴图通常不需要关联一个特定的局部坐标点,其数据会被用于户外物件的照明,这种cubemap大多是手绘的。
在实际运行的时候,会将地图分割成一个个的sector,每个sector关联一张cubemap,在两个相邻的sector过渡的时候,会需要对两张cubemap做采样并混合,这也就是为什么这种方法被称之为Camera-based(即什么时候取用哪张cubemap是由相机位置决定,而非物件本身决定)的由来。
再来看看局部照明IBL。
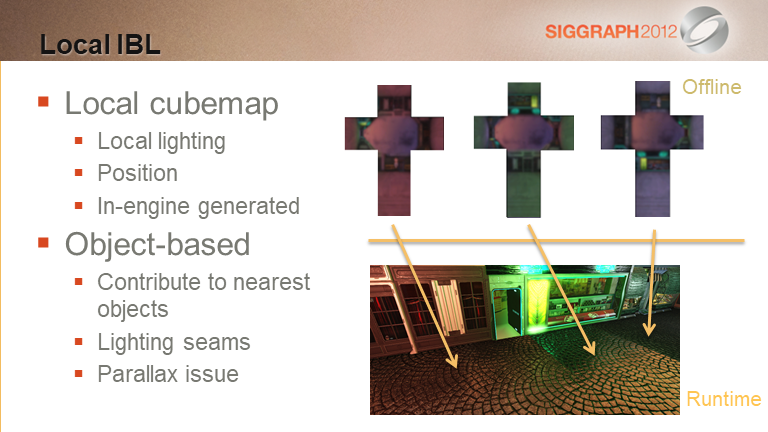
局部照明的cubemap是程序捕获的,而非手绘。每个cubemap有个对应的捕获点,这种cubemap多用于室内、局部照明效果。
在运行时,某个物件该取用哪张cubemap是提前分配好的,跟camera本身的位置无关,因此这种方法也被称之为Object-based IBL。
这种方法在局部细节上表现较好,问题在于两点:
- 由于局部性的作用,相邻的两个物体可能会被分配给不同的两个cubemap,造成效果不连贯
- 因为捕获的数据偏局部,在相机位置跟捕获点不重合的时候,就会存在视差问题

这里对问题做了进一步解释。
左图展示的是一块地板被分割成多个区域,每个区域由一个local cubemap所覆盖,导致在边界位置存在明显的接缝问题。作者表示,虽然项目组尝试了局部cubemap的混合策略,但是发现效果依然不能让人满意。
与此同时,对于一块较大的可能会需要由多个cubemap覆盖的物体(墙体、地板)而言,考虑到shading的高效性,还需要将之拆分出来(单个cubemap影响,多个cubemap混合影响)多个部分,对生产效率也会有较大影响。
右图展示的是视差问题,这里有个视频。

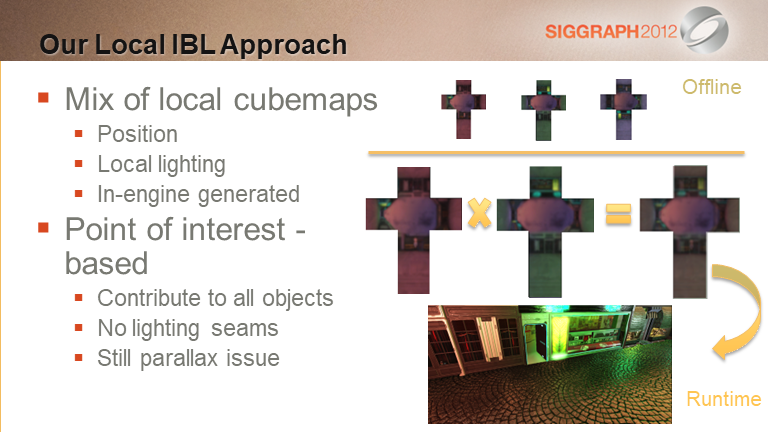
本文给出的方案被称之为POI-based方法,其基本思路为:
- 基于某个点对当前视角中需要关注的cubemap做混合,之后基于混合后的cubemap为场景中所有物件做光照处理
- 混合点可以是相机位置、角色位置或者其他某个dummy actor的位置
- 混合权重由美术同学基于需要给出(可能是某种策略,比如基于距离、角度、可见性等)
应用了这个方案之后,前面的接缝问题就都能解决了。
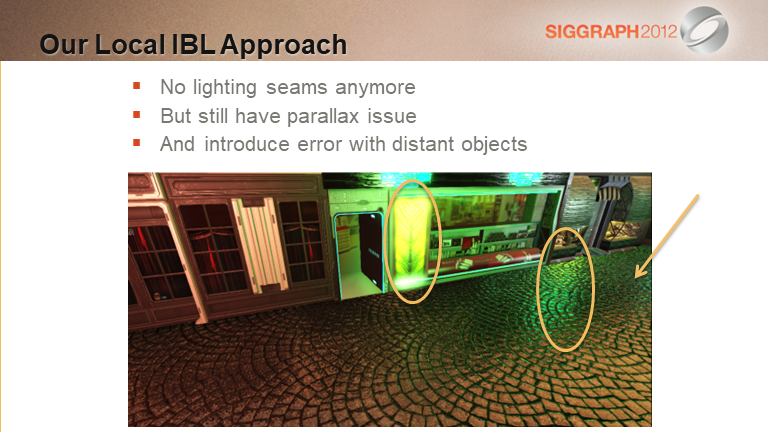
基于上述混合的方案之后,前面提到的接缝问题就没了,如这里展示的一样。不过还有两个问题需要处理:
- 视差问题依然存在
- 远景部分的反射精度有所下降
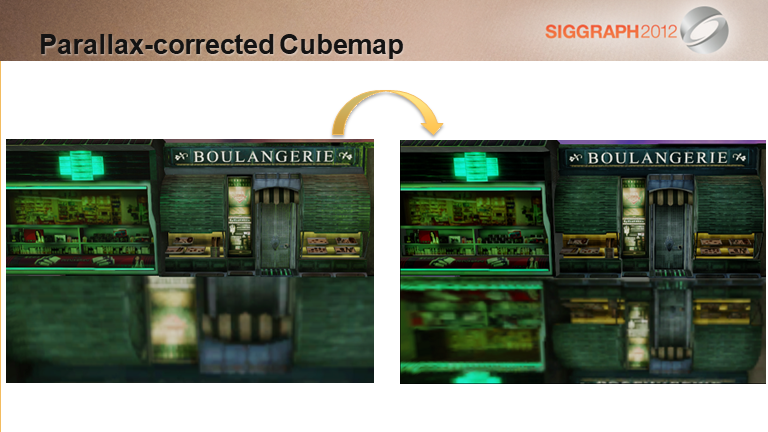
左图是存在视差问题的效果截图,右边是期望达成的效果
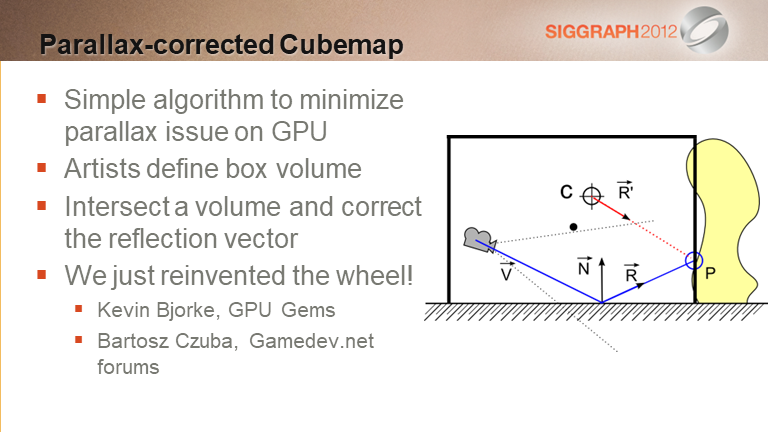
先来看下右边的示意图:
- C点是cubemap捕获点
- 目前相机需要采样地表反射位置(P点)的颜色
- 那我们就只需要连接C点跟P点,找到cubemap上交点坐标并采样即可
在实际执行上:
- 美术同学会用一个box volume来近似代表包围着cubemap的一个几何体,即图中的黑色方框
- box volume的中心点跟cubemap的捕捉点不一定重叠
- 在查找被反射点的时候,就以该box volume的边界为准(即P点是落在box volume上的)
- 找到反射点后,就如前面所说,通过CP连线找到采样点即可
这个方法其实也不是这里最先发明,这里也指出,在更早的时候就已经被其他项目的人采用过了。
如果没有指定box,可以考虑使用无穷远作为box,这样就可以把天光跟局部环境光反射统一起来了
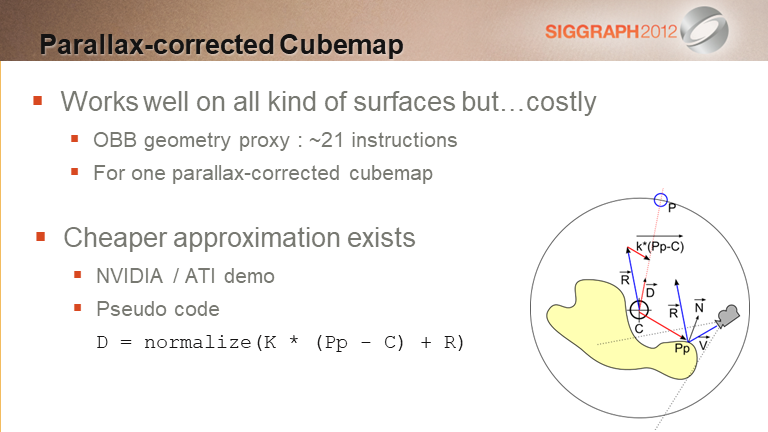
上述方案效果很好,唯一的问题是计算消耗比较高,并且随着需要混合的cubemap数目增多,这个消耗还要在这个基数上翻倍。
参考Nvidia跟ATI的方案,这里给出了一个简化版本,总体的思路是以sphere作为外接形状,如上图所示,我们需要的是从Pp点反射出去撞到外接球的P点,而从cubemap中心点C出发到P点的向量$\vec D$ = $\vec{C \cdot Pp} + \vec{Pp \cdot P}$,对这个公式乘以一个系数K,就得到了上图中的伪代码。
从这里也可以看到,系数K准确来说应该是跟反射点位置、球体半径等是有关系的,而文中说的K是一个与球体半径、物件本身尺寸有关的参数,由美术同学手动给出,这个会给美术同学增加较大的工作量来做效果的调校。
经过这个优化后,PS3上单个cubemap的校正指令数就从21下降到8,同时值得一提的事Tri Ace research也用了类似的方案。
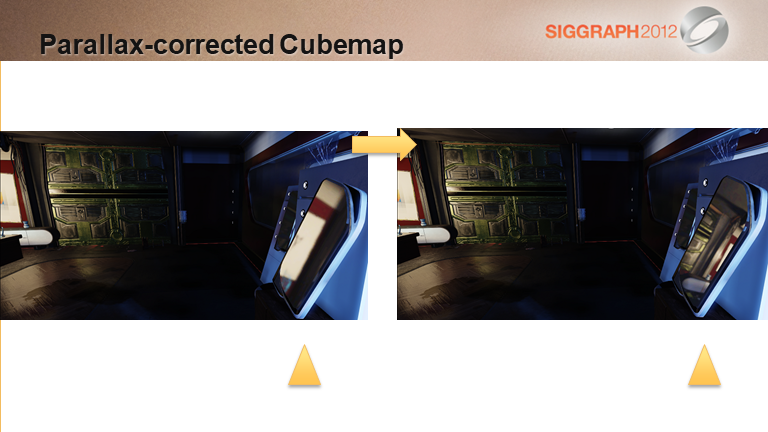
这里给出了简化方案的效果,左侧是没做修正的,右侧是修正完成的
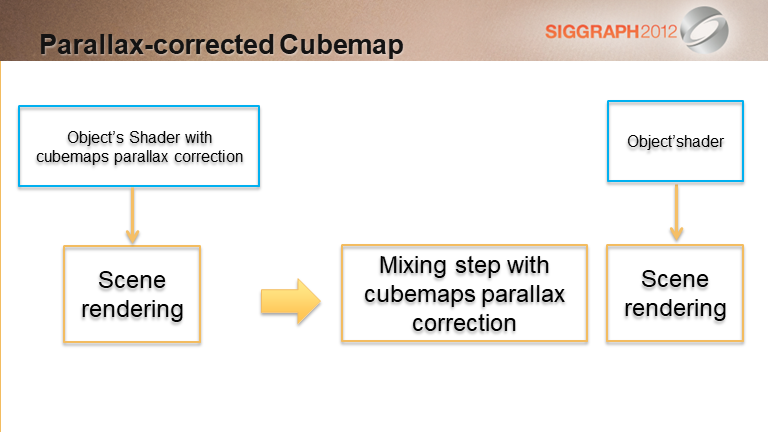
前面说到了如果需要美术同学手动调校每个物件上的系数K,效率会比较低,这里的解决方案是将局部cubemap的采样处理独立出来,而非集成到物体本身的绘制shader中,而采用这种方式,就需要一个新的视差校正方案(因为在这个地方,就不知道像素的位置?)
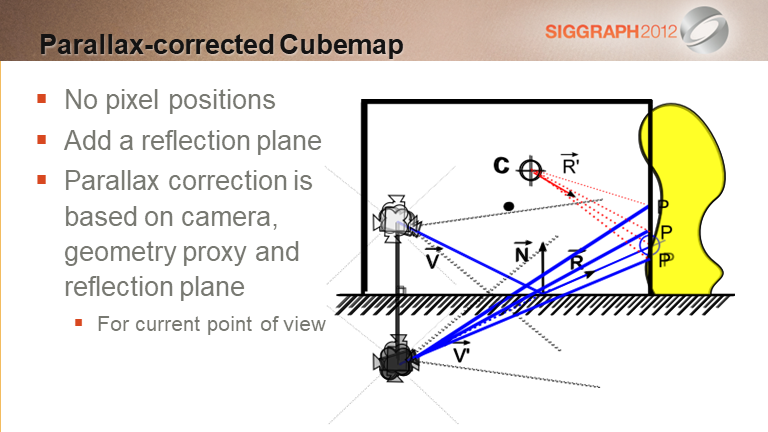
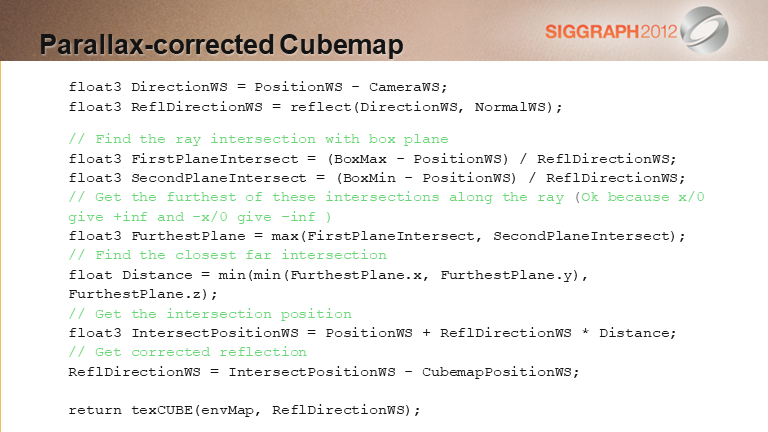
不用反射点的坐标,这里添加了一个反射平面,基于反射平面,可以拿到反射向量,同样的,该向量会与box volume相交,之后拿到该点在cubemap上的数据即可。
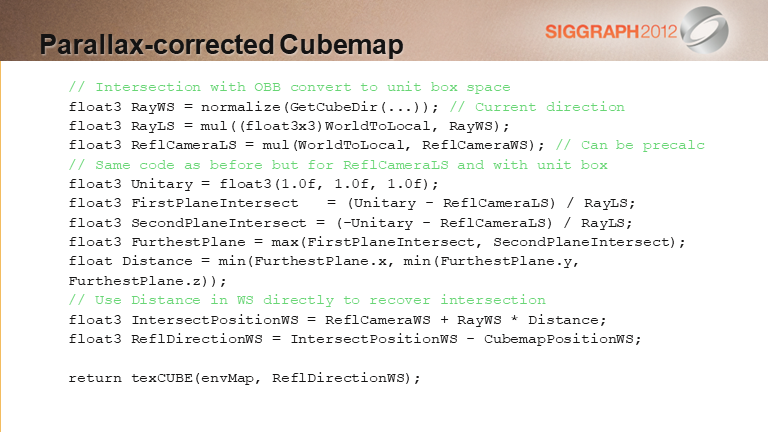
大概解释一下伪代码的实现逻辑:
- ReflCamera指的是相机相对于反射平面的Virtual camera的位置
- RayWS指的是从ReflCamera出发的射线,RayLS则是转换到unit box space的方向
- Unitary-ReflCameraLS指的是ReflCamera到unit box的边界的向量,也可以理解为在三个方向上还有多少的延展空间,这个向量除以RayLS,可以理解为RayLS方向上走多远的距离能分别跟三个(轴)平面相交
- -Unitary-ReflCameraLS同理,则是另外三个负方向的轴平面的步进距离
- 基于这两个相交向量(三维),我们取最大值(一正一负,取一正;两正则取远一点的平面)作为我们需要的相交点的步进距离
- 基于上述步进距离,我们就可以求得cubemap上的交点在cubemap上的坐标
针对这个实现,目前有两点疑问:
-
这里需要针对单一的反射平面,如果我们要反射的物体本身不是平面,该怎么办
- 那可能这里求取反射相机的位置就不能是逐object进行,而是逐pixel进行(或者逐vertex进行)
-
针对单一反射平面,我们要怎么实现逐cubemap texel的计算,是需要绘制一个cube,之后在PS中执行上述代码吗?
- 从后面的介绍来看,是对cubemap上的每个texel做遍历来实现的
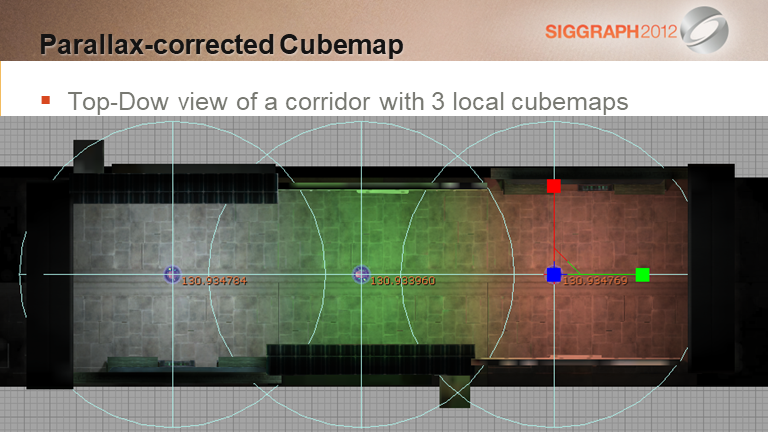
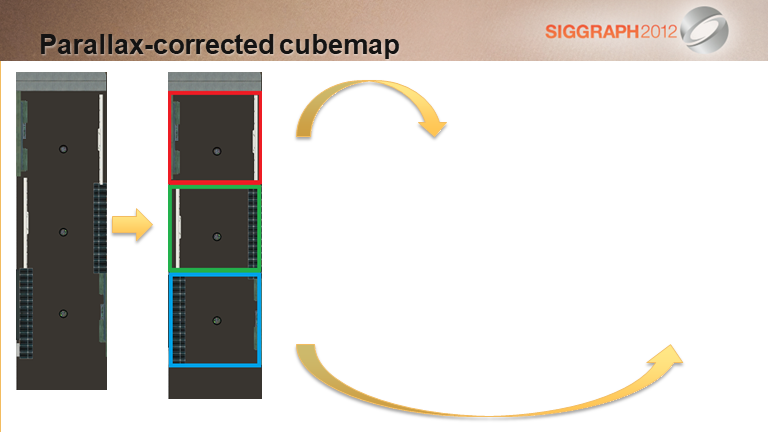
这里给了一个顶视图效果,一条走廊由三个cubemap覆盖,在重叠区域还设置了对应cubemap的混合权重
这里给了个视频展示了对应的效果
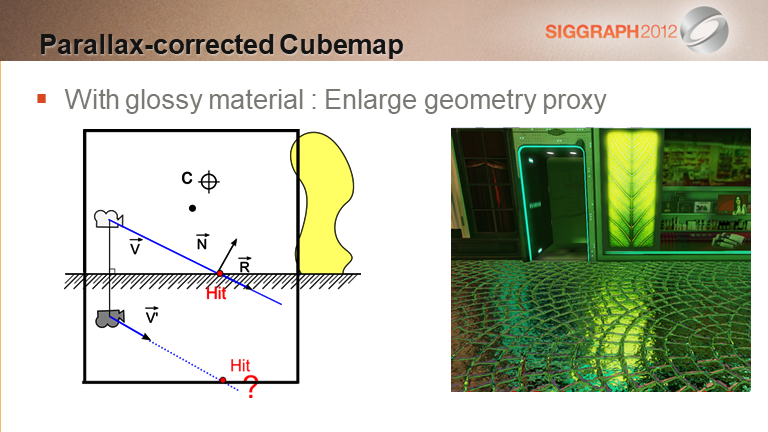
对于光滑表面而言,由于法线贴图的存在,我们的反射射线有可能会采样到反射平面以下的颜色数据(反射结果),也就是说,如果不做特殊处理的话,沿着此前的公式,我们的反射相机的命中点就会出错,不能正确反映反射结果。
对于这个问题,我们只需要确保反射相机也处于unit box之中即可,即unit box需要将反射相机也包裹进去(PPT中有一个较为明白的效果对比)
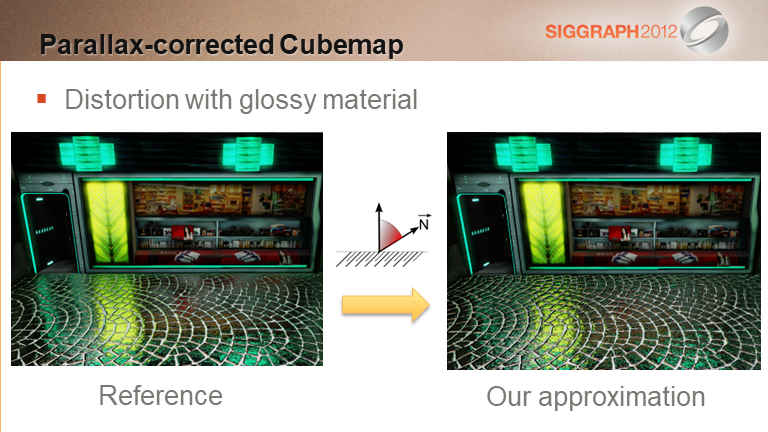
前面说过,当前的方法是在平面反射的假设上实现的,当光滑表面上带有法线贴图的时候,法线偏转就会打破这个假设,从而导致效果的失真,不过由于人眼对于细节的轻微变化感知不是太强烈,因此大部分情况下也不是太大的问题。

这里对方法做了一点改进,之前的策略是对cubemap上的texel做遍历来实现投影的视察校正的,这里改成将cubemap投影到一个几何体proxy上,比如一个box或者一个sphere,之后对这个几何体进行绘制,在PS中完成相关计算。
基于这种思路,就可以不用局限在box或者sphere上,而是任意的凸多面体,不过这里需要注意,并不是所有的几何体都是可用的,部分几何体形状可能会导致其他的瑕疵。
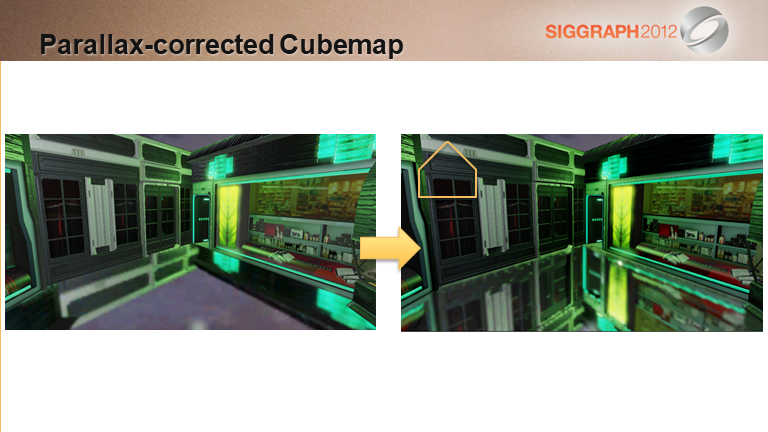
这里展示了使用不同的凸多面体会导致效果的差异,比如这个室内的建筑的墙体布局本身不是box形状,而是类似一个房子的形状,这时候使用box作为渲染几何体跟使用贴合墙面形状的几何体作为渲染几何体,得到的效果是不同的,后者会具有更好的精度。
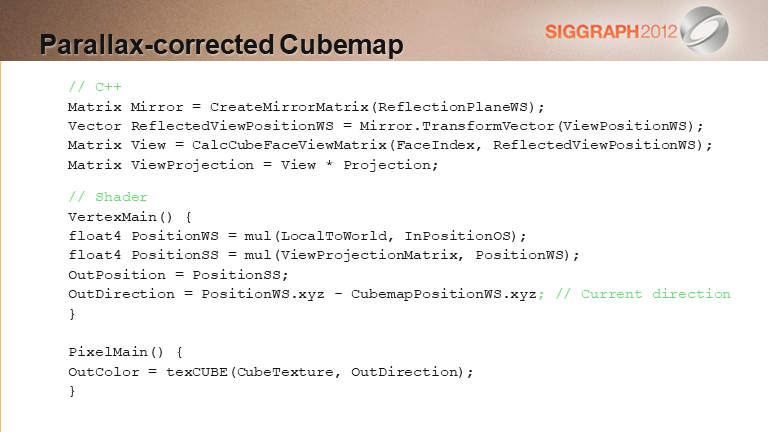
这里展示了如何将cubemap贴到任意凸多面体上的实现代码,包括C++层跟Shader层,经过这个处理后,就能够基于凸多面体完成对应表面的反射效果(或者可以将这两部分合二为一)。
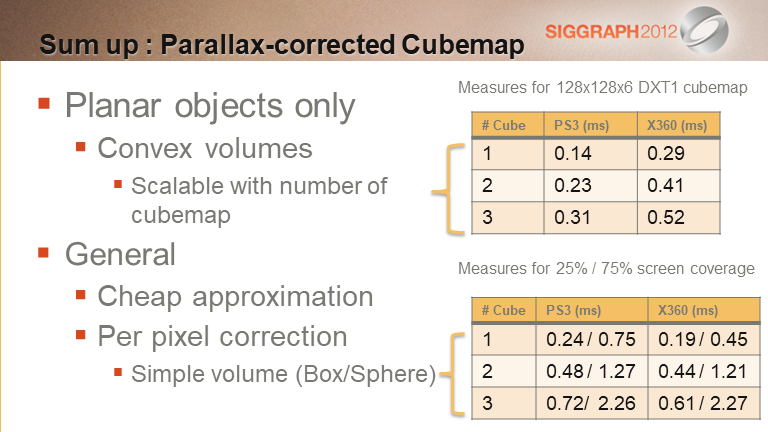
这里对前面的多种方法进行了总结:
- 最初的方法可以处理任意的凸多面体,且具备较好的伸缩性(通过调整混合时参与的cubemap的数目),不过这种方法只能应用于平面物体
- 后面的两种种方法不受物体是否平面的限制,其中第一种需要美术同学手动调校,不是很高效,第二种则不用单独调校,但是在多个cubemap的情况下伸缩性较差
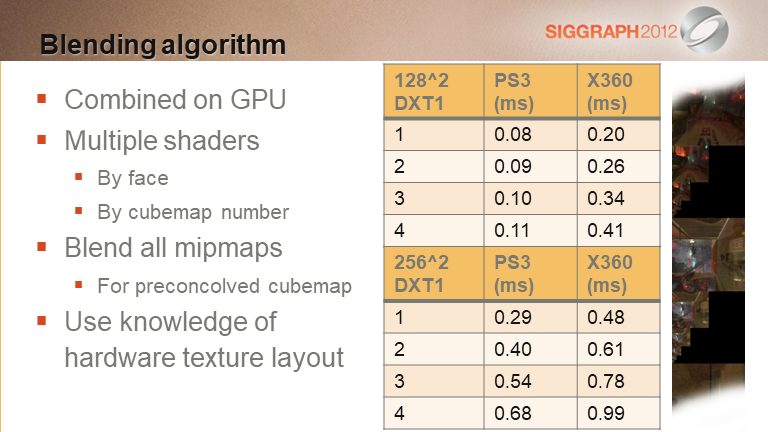
- 上图展示了三种方法的时间消耗,总的来说,每增加一个cubemap,在PS3上大约需要新增0.08的消耗,另外,这个消耗跟需要计算反射的像素的占比有关,右下角的表格给出了屏占比25%跟75%的像素需要反射计算时的消耗比对
- 总的来说,对于平面物件而言,可以选择第一种方法,成本低,其他物件则建议使用后两种方案

这个方案的一个问题是,随着到POI距离的增加,光照结果的准确性也会急剧下降,这里提供了几种解决的策略:
- 通过与环境光的混合来掩盖这个问题(可以从lightmap或者SH中拿到环境光数据)
- 随着距离的拉远,逐渐fade out环境光反射的占比
- 通过在有瑕疵的区域摆放物件来掩盖
总结
还有一些提升空间,这里会考虑开发一些相配套的工具来应对,可以在GPU Pro 4中找到相关介绍。
前面幻灯片中提到了POI,这里主要指的是反射计算所关心的区域:
- 编辑器中用的是相机位置
- 运行时可以选取角色或者相机位置,作者开发的作品是TPS,所以选择角色作为POI效果会更好
- 也可以根据需要选择其他策略
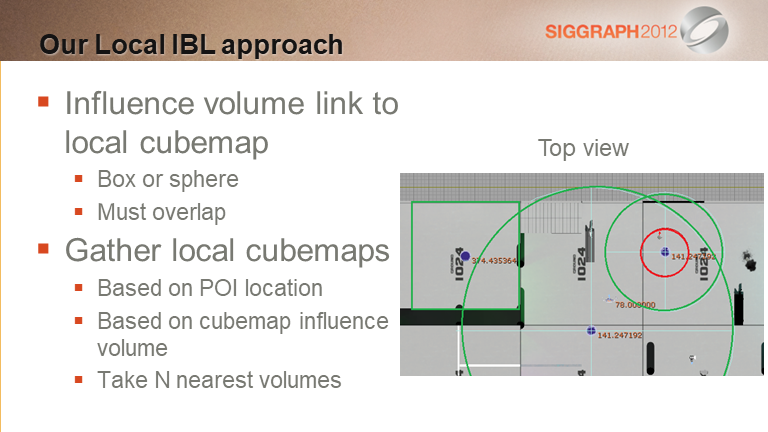
当场景摆放了多个cubemap的时候,需要给出一个计算混合策略:
- 每个cubemap都有一个influence volume,只有当POI处于volume内部,才会考虑该cubemap
- 每个POI每帧需要计算的cubemap数目需要做限制,通常选取influence factor最大的几个cubemap做混合
- influence factor可以提供若干计算机制,比如基于到POI的距离来计算
- 为了快速完成上述计算,通常还需要设计一套加速结构,比如使用八叉树来对cubemap进行管理与查询
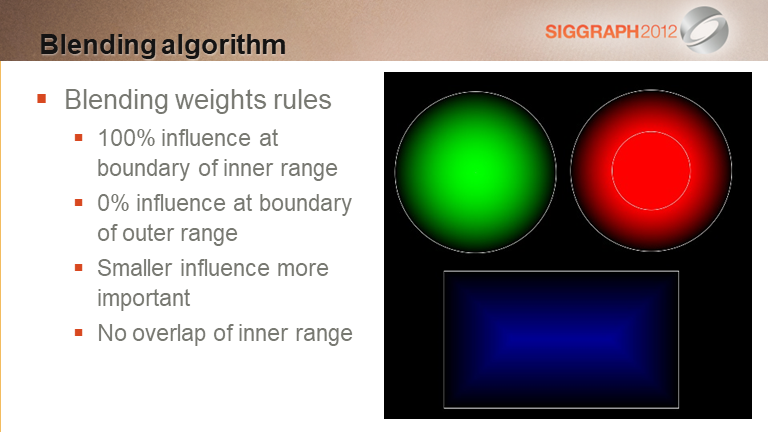
这里介绍了多个参与计算的cubemap的数据是如何混合的,通常对于一个cubemap而言,其圆心位置的权重是1,圆弧是0,中间会有一个fade的过程。
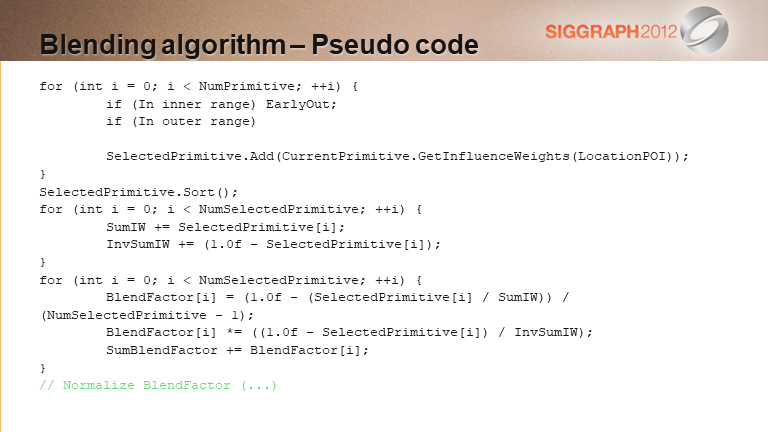
这里给出具体计算的伪代码
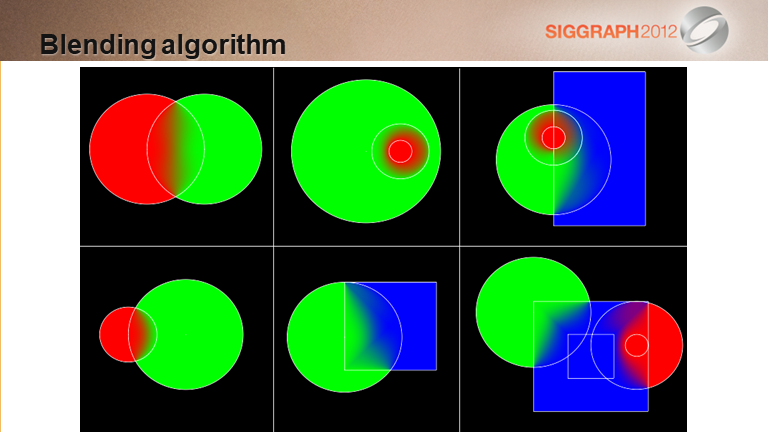
这是几种混合情况下的混合结果。
更多混合细节
这里给出基于AABB策略的视察校正逻辑伪代码,跟前面基于反射平面的计算逻辑基本上重合
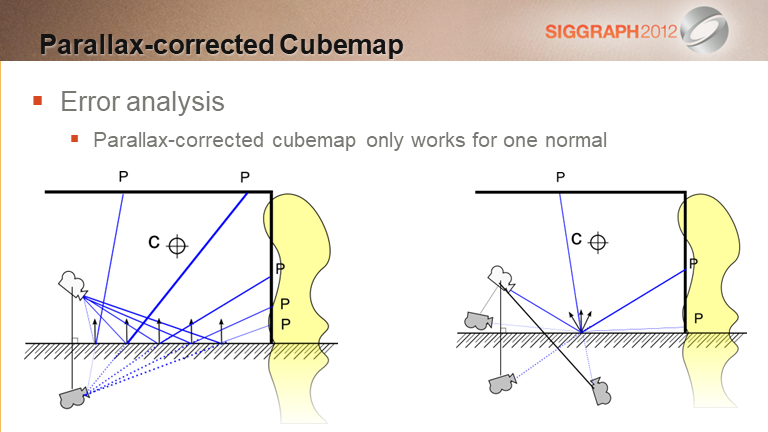
这个幻灯片解释了本算法引入的一些误差。
这里其实解释的是最终的算法要求被反射表面的平整,从而保障一个相对正确的结果,如果表面带有微表面的波折,那结果就会存在影响。
参考
[1]. Siggraph 2012 talk : Local Image-based Lighting With Parallax-corrected Cubemap
[2]. Game Connection 2012 talk : Local Image-based Lighting With Parallax-corrected Cubemap